CLIENT: ARS ELECTRONICA FESTIVAL 2017
EVENT: POSTCITY EXHIBITION
PRODUCTION: LIVE MAPPING PROJECTION
YEAR: 2017
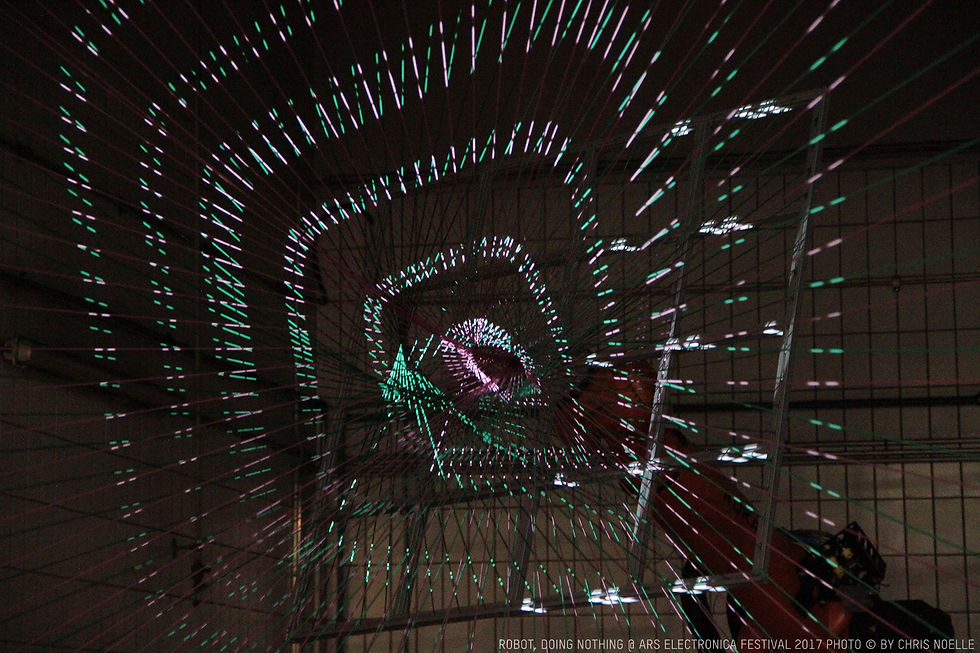
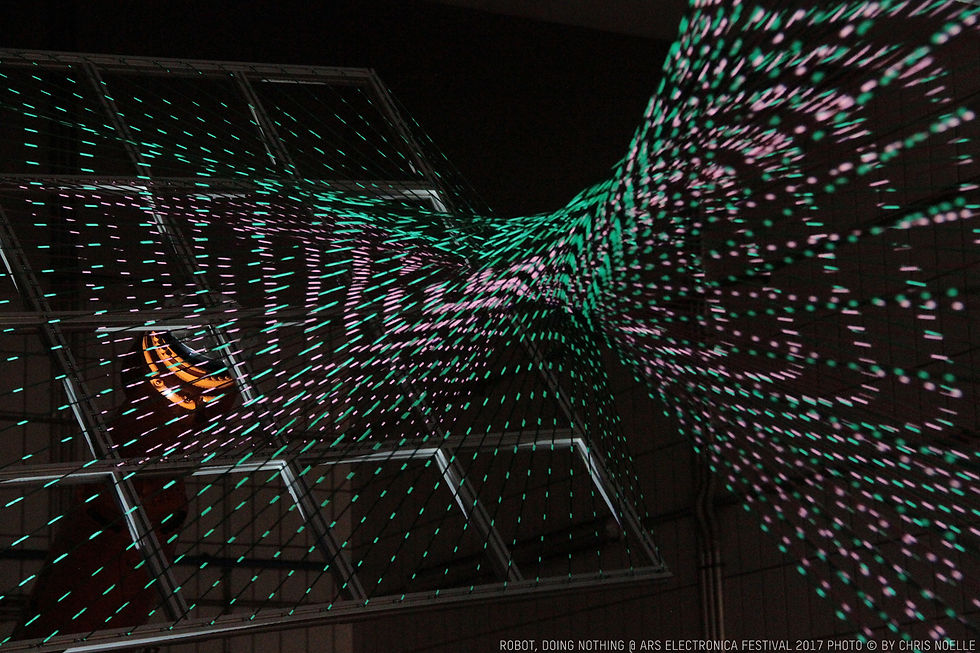
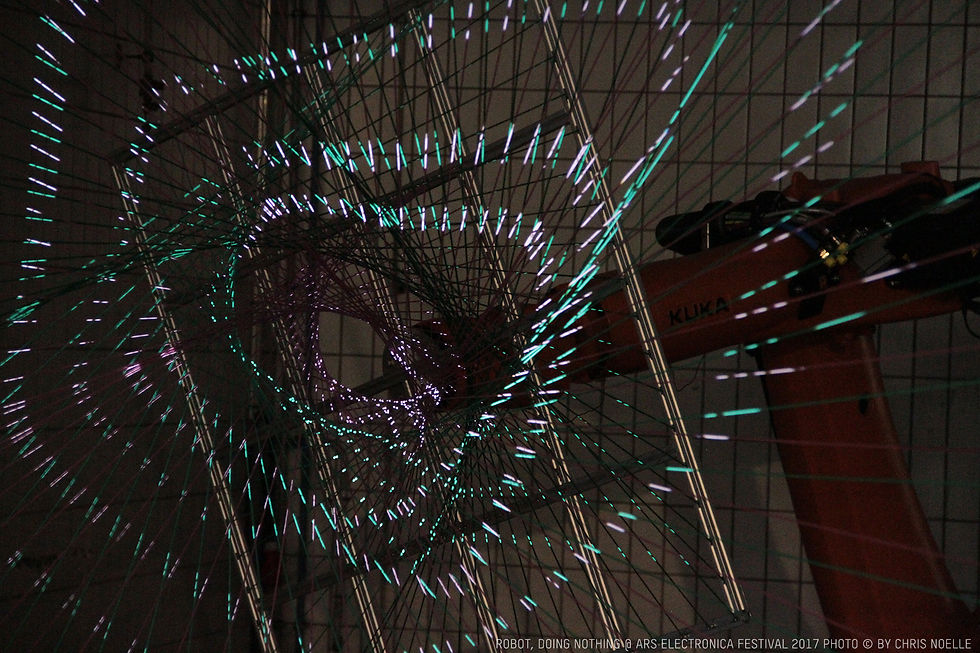
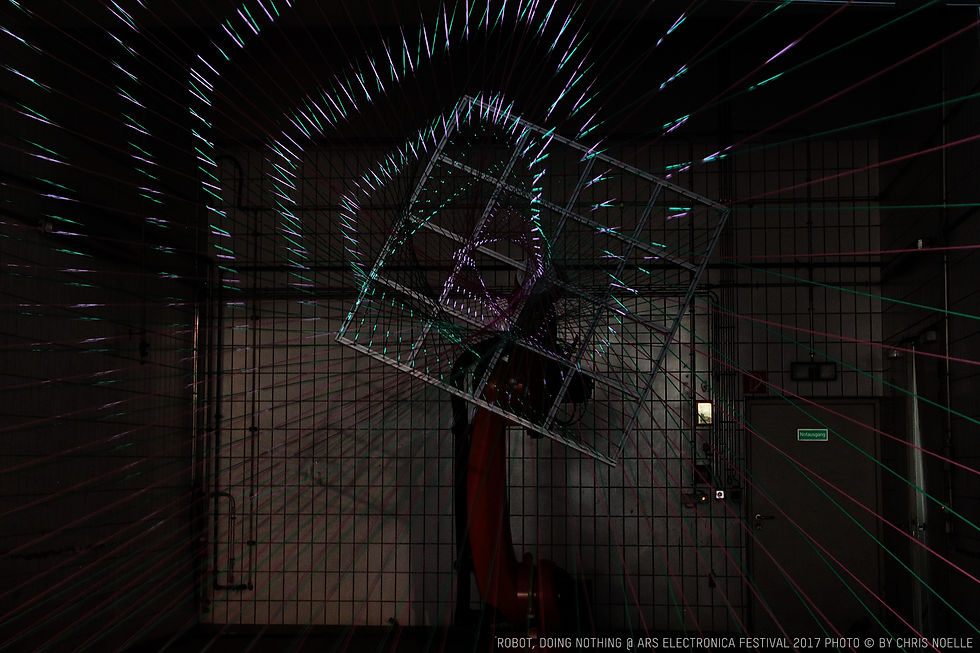
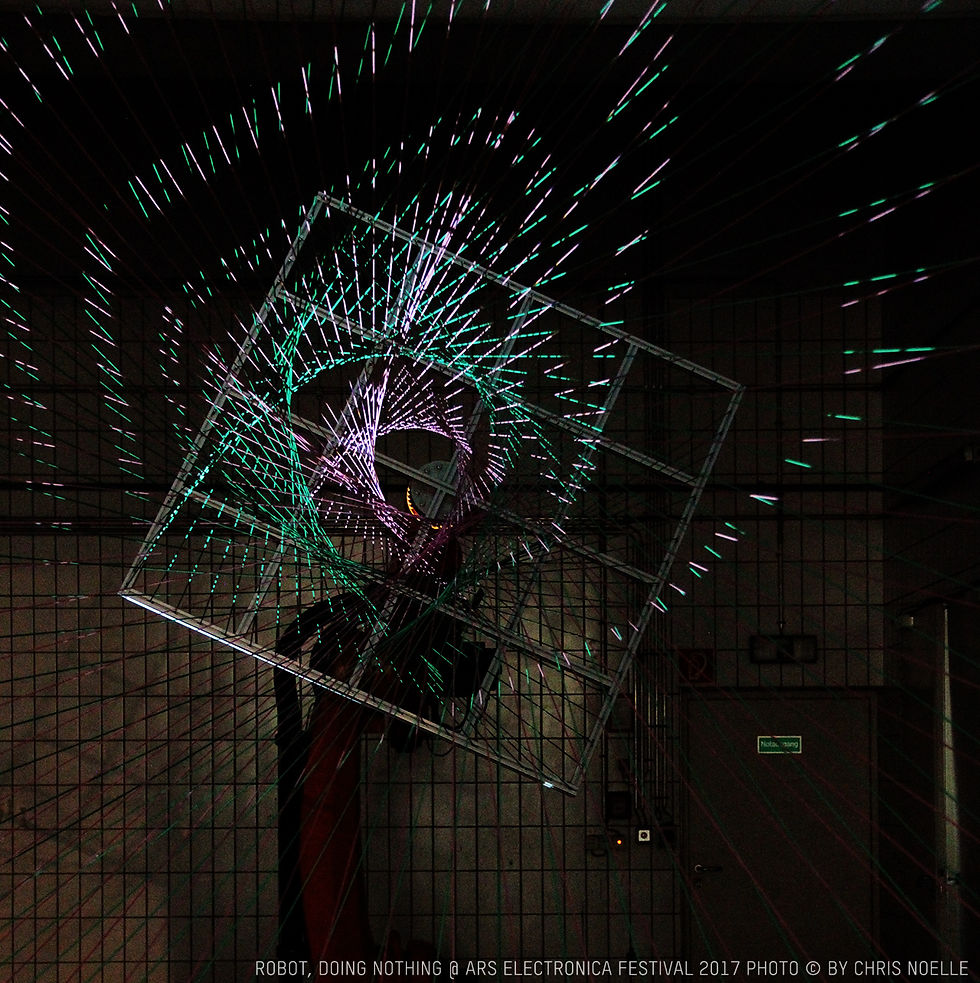
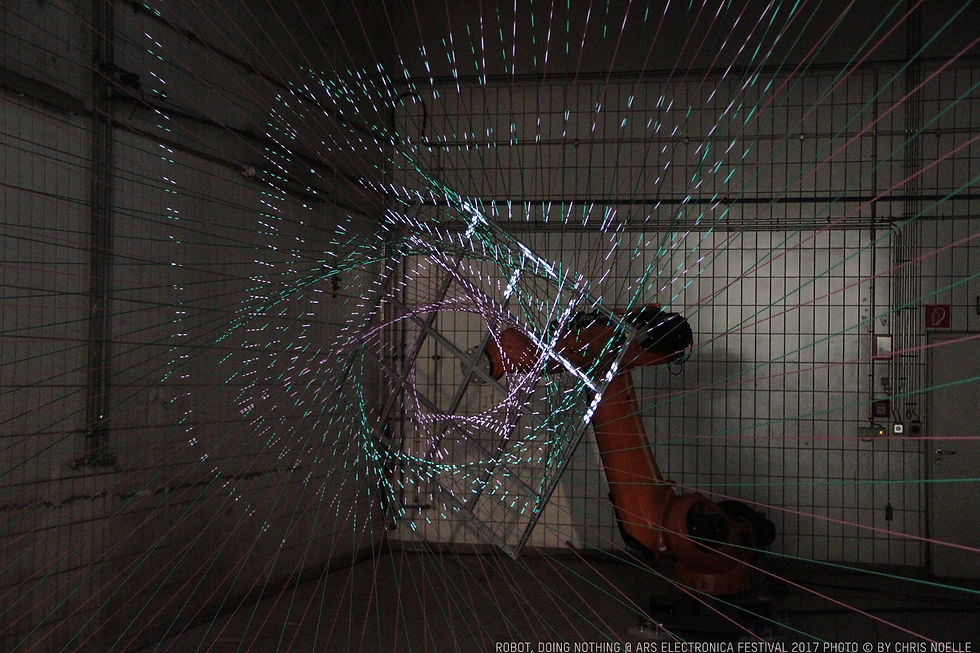
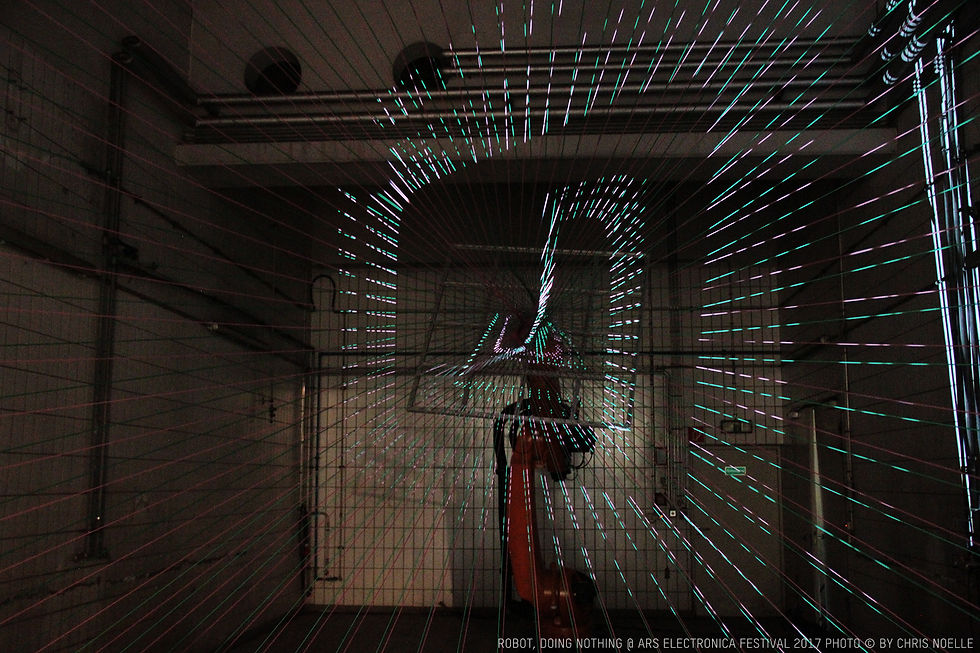
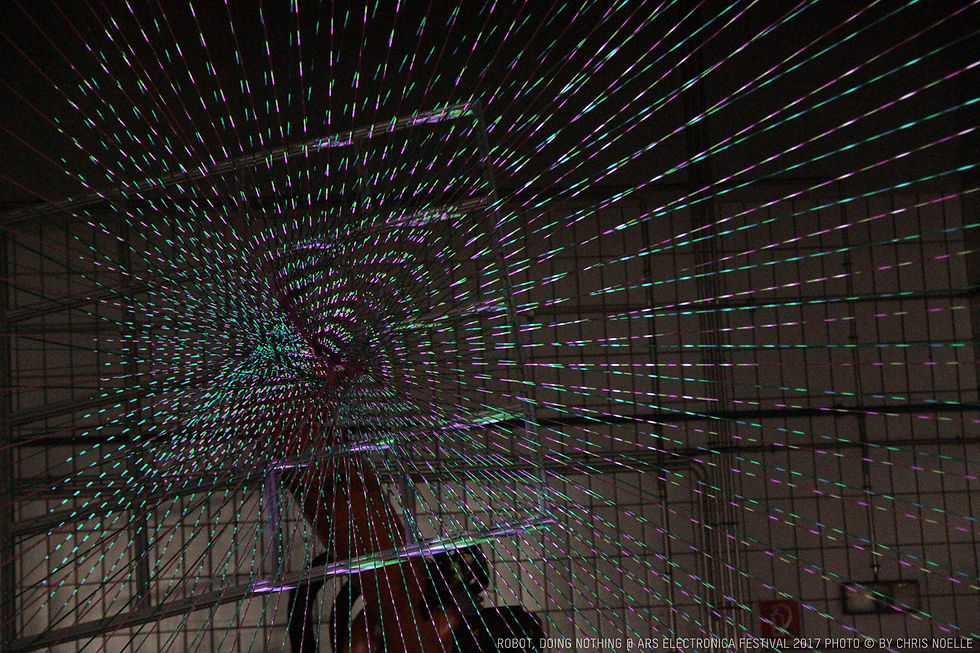
The hypnotic interactive robotic AV-installation "ROBOT, DOING NOTHING." was exhibited @Ars Electronica Festival 2017.
The basic idea of Emanuel Gollob was pushed to the next level by the collaborative aspect, joining forces between interaction, sound, visual projection and the robot itself. Chris Noelle from The Core. was responsible for the generative mapping-projection which was used to accentuate the KUKA IWAA robot as the centerpiece of this meditative installation to create stunning moiree effects by twisting more than 900m of 400 strings which were attached to a square on the robot and in 3,1m distance an enlarged version as counterpart to attach all the strings. The robots seven axis movements produce varying current-consumption while the different tensions are transferred to an analogue soundscapes. The audioreactive black and white projection content is hitting the green and pink strings and transforms the already great looking spiral movements into a blinking threedimensional wiregrid, pure aesthetic floating optical illusions created by the robot became one of the visitors highlights during Ars Electronica Festival 2017 at Postcity, Linz.
ROBOT, DOING NOTHING.
CLIP FROM THE PERFORMACE:
Projection, Film & Cut by Chris Noelle, soundscapes by Michael Schweiger, installation by Emmanuel Gollob in collaboration with Johannes Braumann
GALLERY FROM THE ARTPIECE:
Pictures by Chris Noelle



















ABOUT THE CONCEPT
The concept is based on studies that show improved ability of concentration, empathy and creativity when spending time doing nothing. The conscious activity of “Doing Nothing” might be encouraged by meditative robotic installations in public space. See aec.at/ai/en/robot-doing-nothing/ for more details.
Robot Doing Nothing uses a KUKA Quantec ultra robotic arm with a range of 3.1m. The robot is controlled in real time by the new KUKA mxAutomation interface and allows a direct interaction between the audience and the robot. COPA-DATA zenon HMI enables us to merge the datastreams coming from the robot and laser scanner, visualize it and make it accessible globally through the Microsoft Azure Cloud.
CREDITS:
Concept / Idea by Emanuel Gollob (http://www.emanuelgollob.com)
in collaboration with
Master of Robots: Johannes Braumann
Realtime generated audioreactive visuals : Chris Noelle
Soundscape: Michael Schweiger
Johannes Braumann (UfG Linz, Robotic Laboratory)
Johannes Braumann leads the laboratory for creative robotics at UfG Linz and co-founded Robots in Architecture.
Chris Noelle (projection)
Chris Noelle is visual artist and active in the fields of projection mapping, interactive projections and lightpainting.
Michael Schweiger (sound sonification)
Michael Schweiger is a professional sound artist and sonic thinker and leads the K2 Soundstudio at UFG Linz.
Supported by Copadata, KUKA Robotics CEE, Kunstuniversiät Linz / Soundstudio K2, Ars Electronica